U-Net using PyTorch
1. Introduction
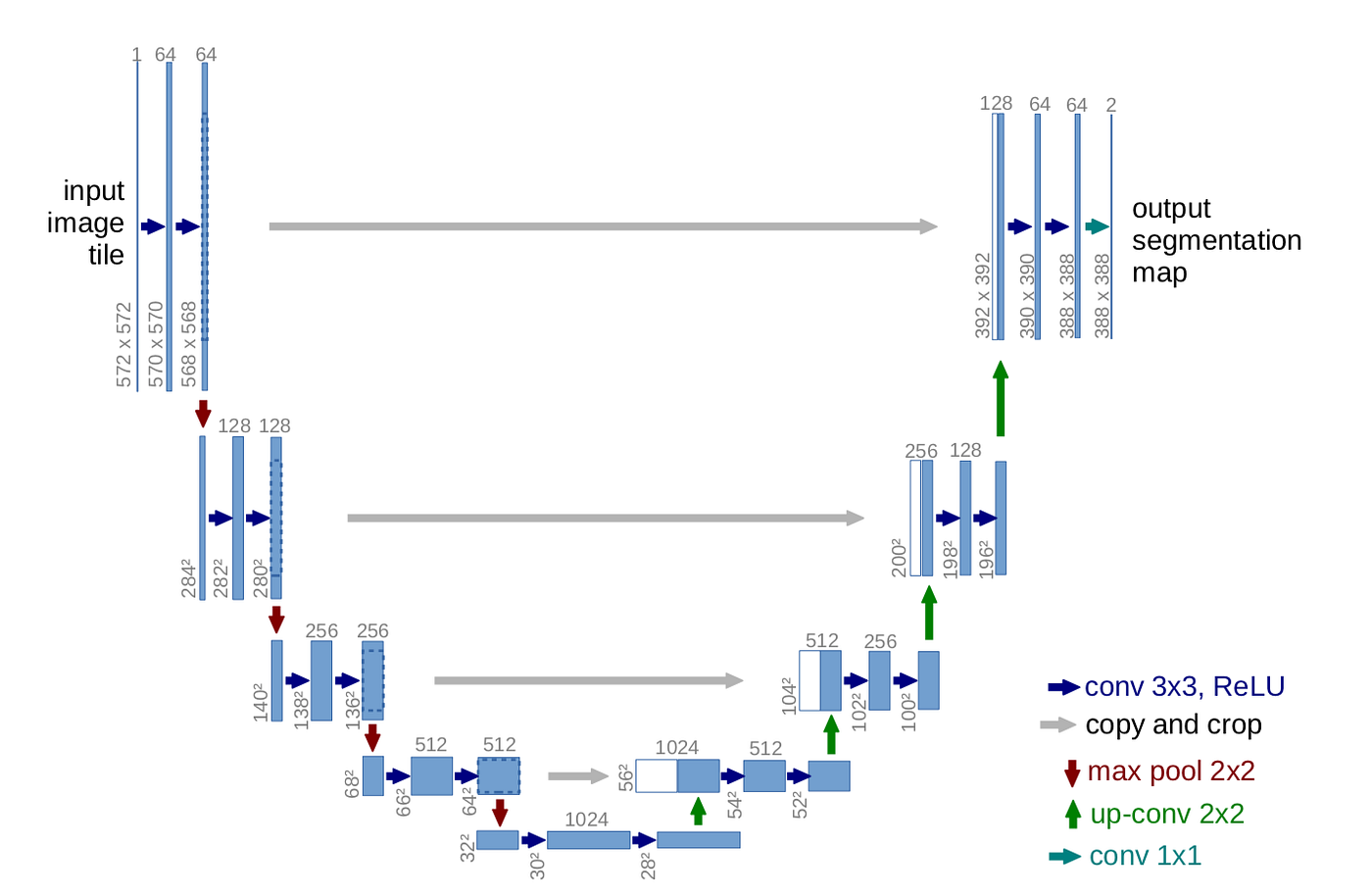
The U-Net architecture is characterized by its unique symmetric U-shaped design, which consists of a contracting path (encoder) and an expansive path (decoder), connected by skip connections. This architecture enables the network to capture both local and global features while preserving spatial information, making it highly effective for pixel-level segmentation tasks.
- Reference: U-Net: Convolutional Networks for Biomedical Image Segmentation
- Weighted loss for seperation of touching objects of the same class
- Overalp-tile strategy for arbitrary large images
2. Components
class DoubleConv(nn.Module):
"""(convolution => [BN] => ReLU) * 2"""
def __init__(self, in_channels, out_channels, mid_channels=None):
super().__init__()
if not mid_channels:
mid_channels = out_channels
self.double_conv = nn.Sequential(
nn.Conv2d(in_channels, mid_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(mid_channels),
nn.ReLU(inplace=True),
nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.double_conv(x)
class Down(nn.Module):
"""Downscaling with maxpool then double conv"""
def __init__(self, in_channels, out_channels):
super().__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2),
DoubleConv(in_channels, out_channels)
)
def forward(self, x):
return self.maxpool_conv(x)
class Up(nn.Module):
"""Upscaling then double conv"""
def __init__(self, in_channels, out_channels, bilinear=True):
super().__init__()
# if bilinear, use the normal convolutions to reduce the number of channels
if bilinear:
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
self.conv = DoubleConv(in_channels, out_channels, in_channels // 2)
else:
self.up = nn.ConvTranspose2d(in_channels, in_channels // 2, kernel_size=2, stride=2)
self.conv = DoubleConv(in_channels, out_channels)
def forward(self, x1, x2):
x1 = self.up(x1)
# input is CHW
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
x = torch.cat([x2, x1], dim=1)
return self.conv(x)
class OutConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)
3. UNet
class UNet(nn.Module):
def __init__(self, n_channels, n_classes, bilinear=False):
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = (DoubleConv(n_channels, 64))
self.down1 = (Down(64, 128))
self.down2 = (Down(128, 256))
self.down3 = (Down(256, 512))
factor = 2 if bilinear else 1
self.down4 = (Down(512, 1024 // factor))
self.up1 = (Up(1024, 512 // factor, bilinear))
self.up2 = (Up(512, 256 // factor, bilinear))
self.up3 = (Up(256, 128 // factor, bilinear))
self.up4 = (Up(128, 64, bilinear))
self.outc = (OutConv(64, n_classes))
def forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits
def use_checkpointing(self):
self.inc = torch.utils.checkpoint(self.inc)
self.down1 = torch.utils.checkpoint(self.down1)
self.down2 = torch.utils.checkpoint(self.down2)
self.down3 = torch.utils.checkpoint(self.down3)
self.down4 = torch.utils.checkpoint(self.down4)
self.up1 = torch.utils.checkpoint(self.up1)
self.up2 = torch.utils.checkpoint(self.up2)
self.up3 = torch.utils.checkpoint(self.up3)
self.up4 = torch.utils.checkpoint(self.up4)
self.outc = torch.utils.checkpoint(self.outc)
Enjoy Reading This Article?
Here are some more articles you might like to read next: